默认功能
车道保持辅助系统
自动紧急制动系统
主动避障系统
自适应巡航系统
自动泊车系统
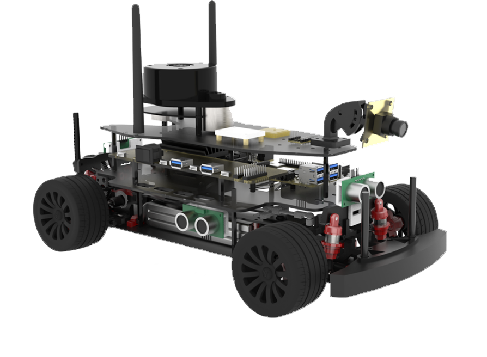
 车辆参数
车辆参数整车尺寸:长*宽*高≥423*190*180mm
整车质量:约 3Kg;
整体架构:电控,后置后驱,独立悬架;
电池参数:4200mAh;(续航 2-3 小时)
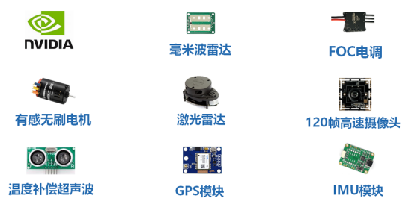
计算单元:树莓派 4B+
感知:超声波雷达
感知:摄像头模组
感知定位:激光雷达
定位:GPS+BD 双模
定位:IMU 传感器
转向:舵机
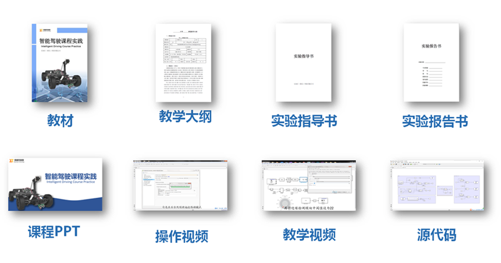
配套资料:教材、实验指导书、实验报告和源代码,可做30种实训竞赛项目

 智能驾驶实训平台车配置说明
智能驾驶实训平台车配置说明感知硬件:16线激光雷达、毫米波雷达、摄像头
通讯硬件:车规级CAN通讯,千兆网络交互平台。
定位硬件:双天线RTK模块,模块导航。
算力硬件:多冗余超算嵌入式平台(NVIDIA Jetson AGX Xavier/华为MDC)。
平台硬件:车规级线控底盘平台。
交互内容:15.6寸交互大屏,专业学习开发应用。
教学功能点结构原理:线控底盘、传感器、计算平台结构原理
算法开发:循迹、计算机视觉、SLAM、信息融合
功能测试:AEB测试、ACC测试
装调标定:传感器、HMI、计算平台装调标定
故障检测:电源故障、通讯故障

● 成功举办五届
● 2022年,450余支车队逐鹿赛道,7位院士、120多位行业专家联合助力,750余家国外媒体播报
● 功能型无人车挑战赛,27家高校,20+车队,完成人车共行,行人横穿,定点交付等10个场景任务
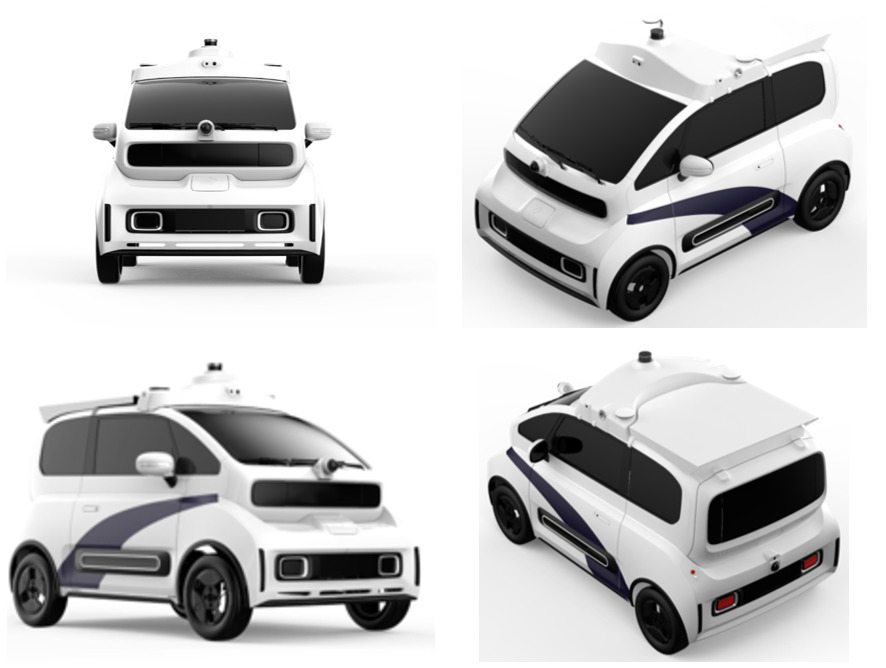 智能驾驶实训平台车配置说明
智能驾驶实训平台车配置说明车辆尺寸:3070*1870*2000
电池容量:31.9kwh,续航250km
定位硬件:NavBox2.0
算力硬件:2×Xavier
感知硬件:3×Lidar、5×Camera
交互内容:手机APP、扩展SDK接口、车云接口。
教学实训功能点通过工控机+标准交互接口,可调用原车所有传感器数据,并可下发控制指令,从而聚焦研究前沿算法
教学拆装、故障诊断、激光雷达等感知传感器的标定、L4级自动驾驶的功能实现及操作、对自动驾驶及线控车辆关键核心参数的读取与通信、L4智能网联汽车测试

● 基于自动驾驶、智能网联和车路协同等智能交通行业先进技术,在该高校校园内建设车路协同实验路段
● 通过对车辆的线控化改制,在车辆上搭载激光雷达等智能感知传感器,应用自动驾驶车辆的感知识别,路径规划,决策控制等算法,实现该智能驾驶平台车在限定场景下的L4的自动驾驶功能
● 智能驾驶平台车能够实现在校园内的自动驾驶展示,车路协同应用场景测试,自动驾驶算法的更新迭代及学生的教学应用

 官方微信
官方微信
 IVISTA微信
IVISTA微信

 IVISTA微博
IVISTA微博

 IVISTA抖音
IVISTA抖音

 IVISTA头条
IVISTA头条